数字图像处理——频域滤波
空间域的算法很多,也容易理解,但是有时候却很难设计。而有时候一些问题,转化到频域上,就变得迎刃而解了。
从空间域到频域,不得不提的是傅里叶变换(一般信号处理上,从时域到频域)。这里首先说明下什么是变换,也就是将原有的函数,转换成另外的一些更容易分析的函数之和。变换给了我们不同看事物的角度。比较有名的变换有傅里叶变换,拉普拉斯变换,小波变换等等。
傅里叶变换
我们这里主要用到的是傅里叶变换。傅里叶变换的原始定义如下:
$$
f(t) \rightarrow F(\omega)=\int f(t) e^{-j \omega t} d t
$$
这里的$t, \omega$可以是标量,也可以是向量。
如果值是离散的,那么有离散傅里叶变化(DFT,Discrete Fourier Transformation)。离散傅里叶变换和连续傅里叶变化形式上差距还是挺大的:
$$
F(u)=\sum_ {x=0}^{N-1} f(x) \cdot e^{-i \frac{2 \pi}{M} x u}
$$
从矩阵视角:
$$
\begin{array}{c}{\vec{v}=A \vec{u} } \ {\vec{u}=[u(0), u[1], \cdots, u(N-1)]^{T}, \vec{v}=[v(0), v[1], \cdots, v(N-1)]^{T} } \ {A=[a(I, m)]_ {N \times N}, \text { where } a(l, m)=\frac{1}{\sqrt{N} } e^{-j \frac{2 \pi}{N}(l-1)(m-1)} }\end{array}
$$
为什么长这个样子,离散傅里叶变换背后的数学推倒是比较复杂的,幸运的是我们也不需要了解太多,因此在这里就不多说了。这里$A$矩阵是酋矩阵(unitary matrix):
$A^{-1}=A^{* T}=A^{H}.$
有了这个,IDFT(离散傅里叶逆变换)就很容易计算了。因为:
$$
\begin{aligned} u &=A^{-1} v \ u &=A^{H} v \ \Rightarrow u[n] &=\sum_ {k=0}^{N-1} v[k] a^{}(k, n) \end{aligned}
$$
这里,$v(k)$是加权系数,而$a^{}(k, n)$为基函数。
上面提到的是一维的DFT,对于二维的DFT会更麻烦一点。
原始的图像我们用U表示,如下:
$$
U={u[m, n], 0 \leq m, n \leq N-1}
$$
转换系数:
$$
v[k, l]=\sum_ {m=0}^{N-1} \sum_ {n=0}^{N-1} u[m, n] a_ {k l}[m, n]
$$
因为A是酋矩阵:
$$
u[m, n]=\sum_ {k=0}^{N-1} \sum_ {l=0}^{N-1} v[k, l] a_ {k /}^{}[m, n]
$$
基函数$a_ {kl}[m,n]$以及$a_ {kl}^[m,n]$满足:
- 特殊域正交: $$\sum_ {m=0}^{N-1} \sum_ {n=0}^{N-1} a_ {k l}[m, n] a_ {k^{\prime} / l}^{*}[m, n]=\delta\left[k-k^{\prime}, I-l^{\prime}\right]$$
- 空间域的完备性: $$\sum_ {k=0}^{N-1} \sum_ {l=0}^{N-1} a_ {k l}[m, n] a_ {k l}^{*}\left[m^{\prime}, n^{\prime}\right]=\delta\left[m-m^{\prime}, n-n^{\prime}\right]$$
可以看到这里任何一个系数估计都是全局计算,需要$N^2$个乘法以及$N^2-1$个加法。而所有系数计算需要$N^4$的复杂度。这个复杂度是难以接受的。因此我们需要快速傅里叶变换(FFT),对于快速傅里叶变换的具体算法这里就不多介绍了,但是它已经被嵌入到各种各样的程序包中了,可以随时调用。
常见的傅里叶变换
为了介绍离散傅里叶变换的性质,我们先认识下面一些函数:
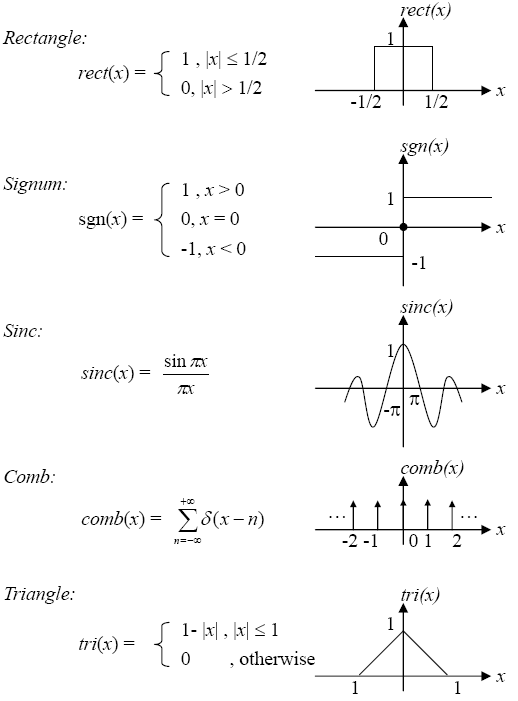
对于傅里叶变换:$f(x,y) \rightarrow F(x,y)$,那么一些常见的函数的傅里叶变换有($\delta(x, y )$为冲激函数):
| $f(x,y)$ | $F(x,y)$ |
|---|---|
| $\delta(x, y)$ | $1$ |
| $\delta\left(x \pm x_ {0}, y \pm y_ {0}\right)$ | $e^{ \pm j 2 \pi\left(x_ {0} \xi_ {1}+y_ {0} \xi_ {2}\right)}$ |
| $e^{-\pi\left(x^{2}+y^{2}\right)}$ | $e^{-\pi\left(\xi_ {1}^{2}+\xi_ {2}^{2}\right)}$ |
| $\operatorname{rect}(x, y)=\operatorname{rect}(x) \operatorname{rect}(y)$ | $\operatorname{sinc}\left(\xi_ {1}, \xi_ {2}\right)=\operatorname{sinc}\left(\xi_ {1}\right) \operatorname{sinc}\left(\xi_ {2}\right)$ |
| $\operatorname{tri}(x, y)$ | $\sin c^{2}\left(\xi_ {1}, \xi_ {2}\right)$ |
| $\operatorname{comb}(x, y)$ | $\operatorname{comb}\left(\xi_ {1}, \xi_ {2}\right)$ |
Translation
- ${f(x, y) \rightarrow F(u, v)}$
- ${f(x, y) e^{\left(j u_ {0} x+j v_ {0} y\right)} \rightarrow F\left(u-u_ {0}, v-v_ {0}\right)}$
- ${f\left(x-x_ {0}, y-y_ {0}\right) \rightarrow F(u, v) e^{\left(-j u x_ {0}-j y_ {0}\right)} }$
Multiplication and Convolution
- ${f(x, y) \star g(x, y) \Rightarrow F(u, v) G(u, v)} $
- ${f(x, y) g(x, y) \Rightarrow F(u, v) \star G(u, v)} $
Scaling
f(a t) \Longleftrightarrow \frac{1}{|a|} F\left(\frac{\omega}{a}\right), \quad a \in \mathbb{R}, a \neq 0
对于傅里叶,必须要提的是高斯函数。它有很多优秀的性质:
- 在空间和频域上都有一定的跨度。
- 高斯的傅里叶变换依然是高斯函数
- 高斯函数乘以高斯函数还是一个高斯函数,只是标准差不同
- 高斯函数的标准差是一个尺度参数
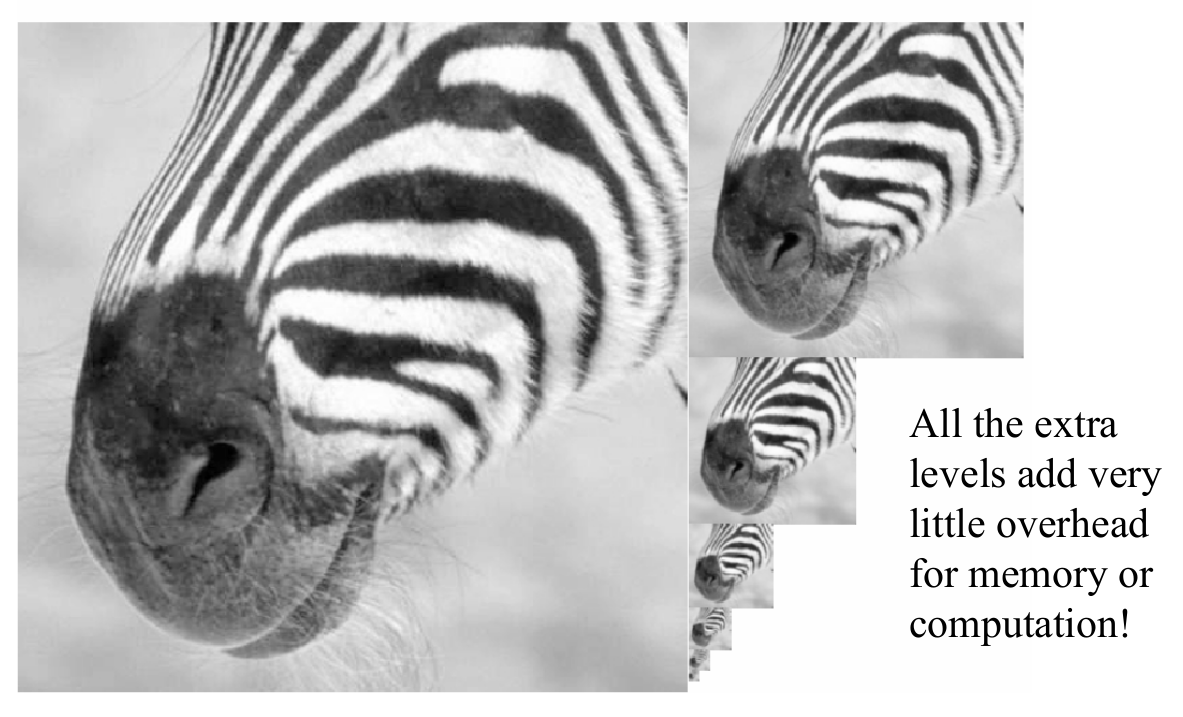
- 我们经常需要在不同尺度上观察图片,而高斯金字塔是一个很好的工具
高斯金字塔是著名的SIFT特征必不可少的预处理步骤。不同尺寸的高斯金字塔,模拟了场景离我们眼睛越来越远时候看到的效果,想对高斯金字塔有详细了解的可以参考论文:Gaussian Pyramid.
频域滤波
在频域上滤波,能够多个看图片的视角,也很容易设计滤波器的形状。它的缺点是计算量较大,由于数字化,使得算法也较为复杂,比如上面的傅里叶变换,我就没完全理解。但是有一些问题,在频域下就非常直观。比如下图:

可以看到原图的去噪(很有规律)在空间域上是几乎无法去除的,但是在频域上就可以看出,是多余的一些异常点造成了这样的噪声。频域滤波的一般过程如下:
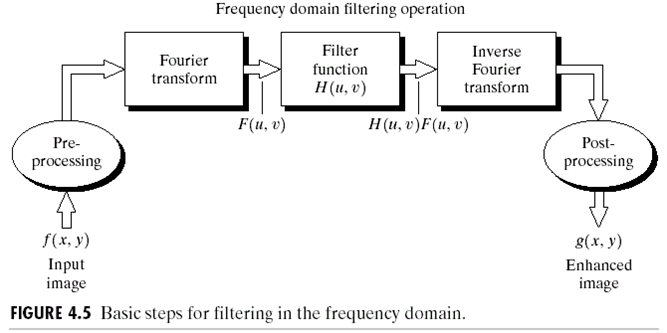
在空间域上的卷积,对应着频域的乘积,因此频域中使用的是乘积操作。频域上一般有高通滤波,低通滤波以及带通滤波。
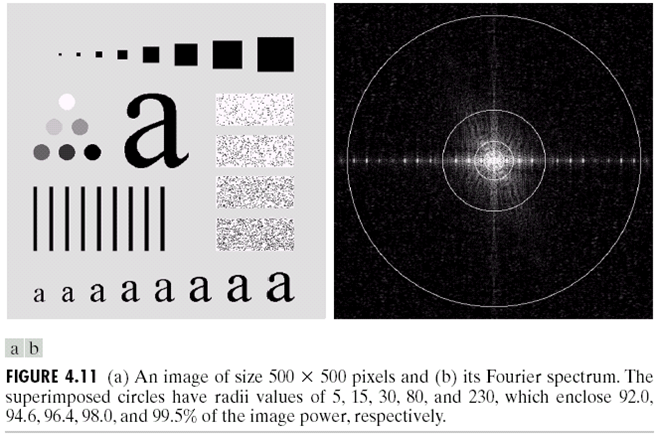
下面是一张图片的原始图和频域图:
低通滤波
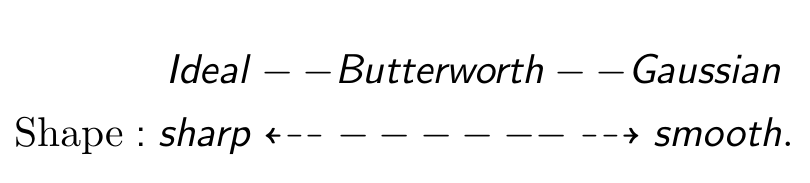
低通滤波可以用来平滑或者模糊图像。关于低通滤波,这里介绍三种滤波器,理想的低通滤波,巴特沃斯滤波,高斯低通滤波。它们都是各向同性的,它们之间的关系是:
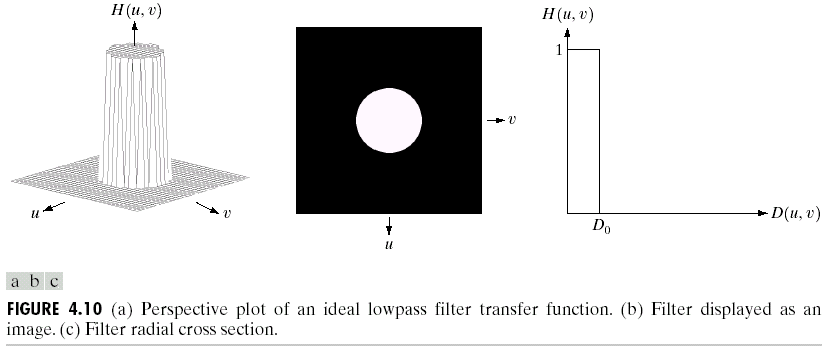
理想的低通滤波数学形式如下:
$$
H(u, v)=\left{\begin{array}{ll}{1} & {\text { if } D(u, v) \leq D_ {0} } \ {0} & {\text { if } D(u, v)>D_ {0} }\end{array}\right.
$$
$D(u, v )$代表的是到原点的欧几里得距离,低通滤波如下图:
这里$D_0$是截断频率,如果确定截断频率是非常重要的一件事,它和我们想滤掉多少频分以及图像的分布有关。下面是一个低通滤波的例子:
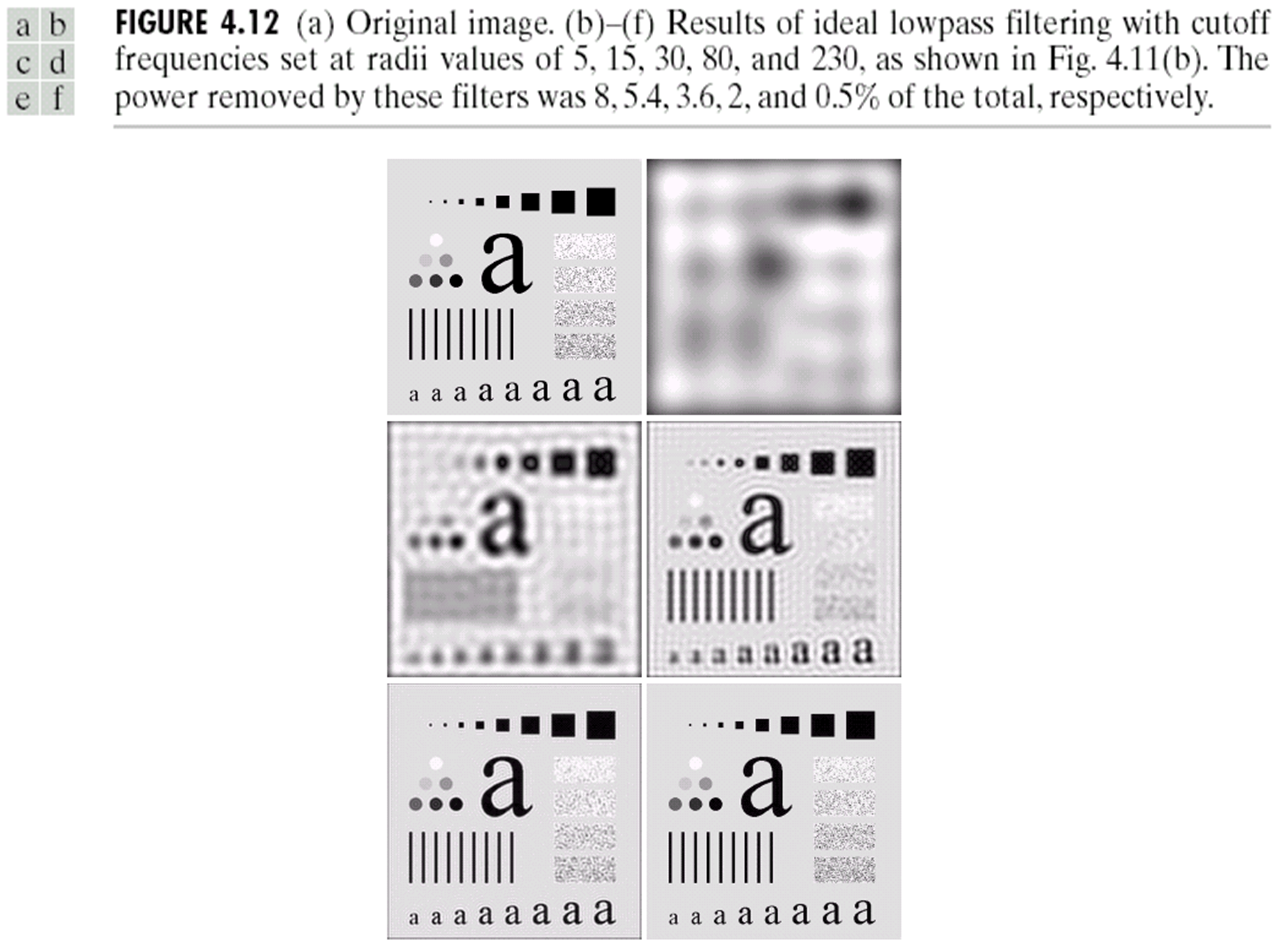
低通滤波很明显可以模糊图像,但是它会带来振铃效应(ringing effect):

**高斯低通滤波(Gaussian Low-Pass Filter)**的做法是用$D_0$代替高斯滤波中的$\delta$:
$$
H(u, v)=e^{-\frac{D^{2}(u, v)}{2 D_ {0}^{2} } }
$$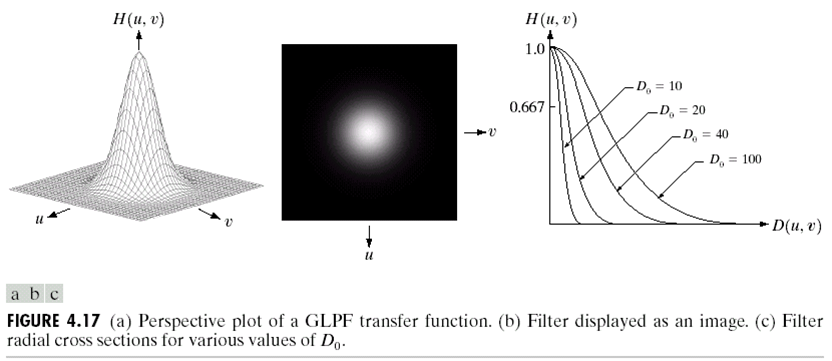
高斯低通滤波的好处在于它在空间域内也容易得到解析形式,而不需要傅里叶变换,而且与理想的低通滤波器相比,在空间域它没有振铃效应。

但是高斯低通滤波的缺点是有时候它不够sharp。因为我们知道,理想低通滤波是直接截断,而高斯滤波则是有比较缓慢的过渡过程。
巴特沃斯低通滤波(Butterworth Low-Pass Filter), 是介于低通滤波与高斯滤波中间的滤波器。它的数学形式如下:
$$
H(u, v)=\frac{1}{1+\left[\frac{D(u, v)}{D_ {0} }\right]^{2 n} }
$$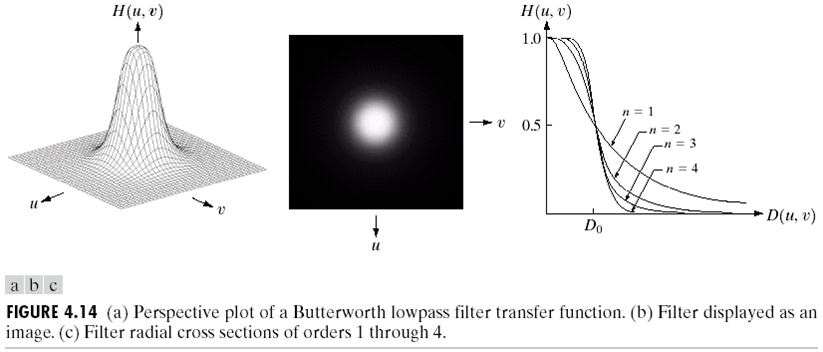
它的振铃效应和次数n有关。

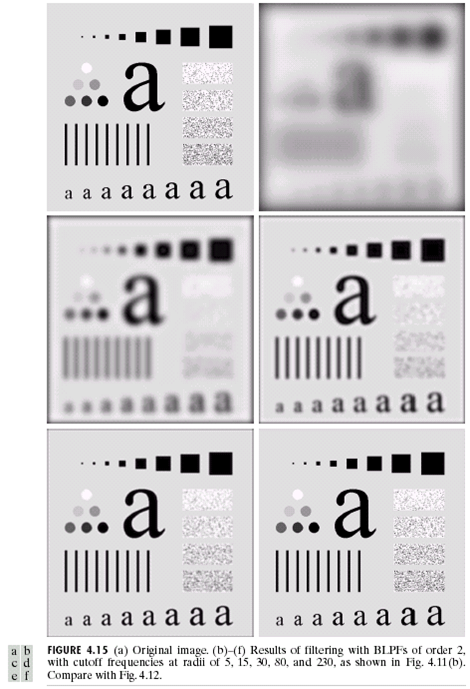
效果图如下:
高通滤波
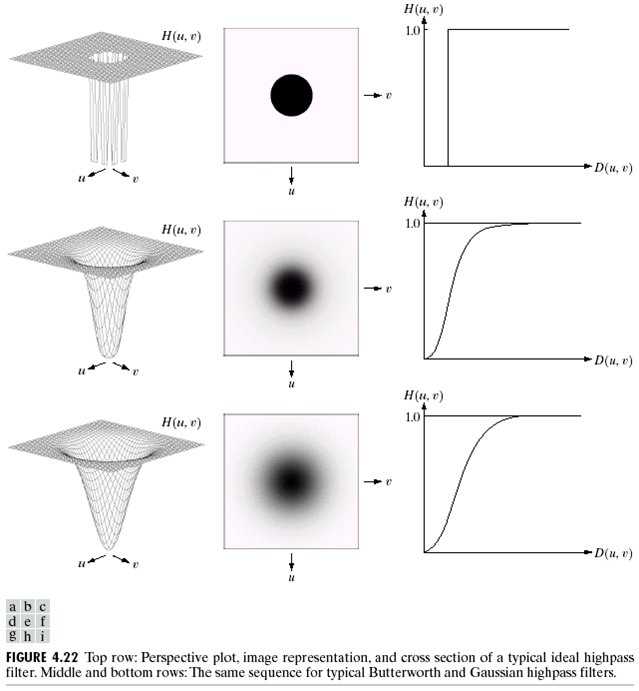
有时候我们需要锐化特征的滤波器,高通滤波可以做到这一点。类似于低通滤波,它也有三种类型,理想高通滤波(Ideal High Pass Filter),高斯高通滤波(Gaussian High Pass Filter)以及巴特沃斯高通滤波(Butterworth High Pass)。
理想高通滤波数学形式:
$$
H(u, v)=\left{\begin{array}{ll}{0} & {\text { if } D(u, v) \leq D_ {0} } \ {1} & {\text { if } D(u, v)>D_ {0} }\end{array}\right.
$$
高斯高通滤波数学形式:
$$
H(u, v)=1-e^{-\frac{D^{2}(u, v)}{2 D_ {0}^{2} } }
$$
巴特沃斯高通滤波数学形式:
$$
H(u, v)=\frac{1}{1+\left[\frac{D_ {0} }{D(u, v)}\right]^{2 n} }
$$
下图分别是IHPF,GHPF,BHPF的图像:
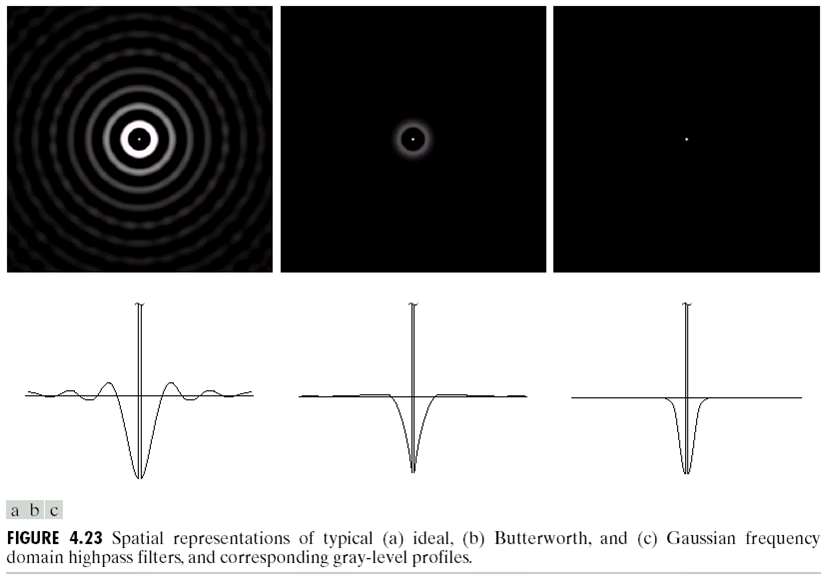
滤波效果:



空间域和频域
在空间域的滤波可以转换成设计在频域的滤波,比如拉普拉斯算子。在空间域中,它的推导如下:
$$
\begin{aligned} \nabla^{2} f &=\frac{\partial^{2} f}{\partial x^{2} }+\frac{\partial^{2} f}{\partial y^{2} } \ \frac{\partial^{2} f}{\partial x^{2} } &=f(x+1, y)+f(x-1, y)-2 f(x, y) \ \frac{\partial^{2} f}{\partial y^{2} } &=f(x, y+1)+f(x, y-1)-2 f(x, y) \ \nabla^{2} f &=[f(x+1, y)+f(x-1, y)+f(x, y+1)+f(x, y-1)]-4 f(x, y) \end{aligned}
$$
由此得到下面的滤波器:

而在频域中,我们可以计算:
$$
\begin{aligned} \mathfrak{F}\left[\frac{d^{n} f(x)}{d x^{n} }\right] &=(j u)^{n} F(u) \ \widetilde{\mathfrak{F} }\left[\frac{\partial^{2} f(x, y)}{\partial x^{2} }+\frac{\partial^{2} f(x, y)}{\partial y^{2} }\right] &=(j u)^{2} F(u, v)+(j v)^{2} F(u, v) \ &=-\left(u^{2}+v^{2}\right) F(u, v) \ \mathfrak{F}\left[\nabla^{2} f(x, y)\right] &=-\left(u^{2}+v^{2}\right) F(u, v) \end{aligned}
$$
因此在频域中,滤波器形状为:$$H(u, v)=-\left(u^{2}+v^{2}\right)$$.

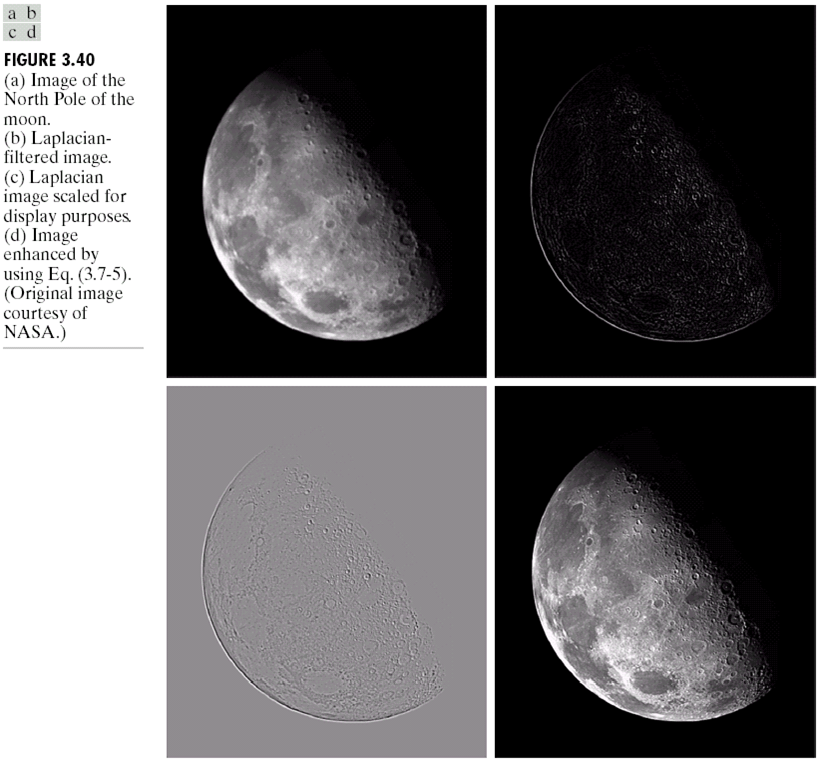
在之前,我们介绍到锐化特征时候的做法,就是先通过原图与模糊图相减得到边缘,然后再加到原始图像上。使用拉普拉斯算子也可以这样做,将使用拉普拉斯算子滤波后的图加到原始图像上,可以得到锐化的效果。数学形式如下:
$$
g(x, y)=\left{\begin{array}{ll}{f(x, y)-\nabla^{2} f(x, y)} & {\text { if the center coefficient of the Laplacian mask is negative} } \ {f(x, y)+\nabla^{2} f(x, y)} & {\text { if the center coefficient of the Laplacian mask is positive.} }\end{array}\right.
$$
效果如图:
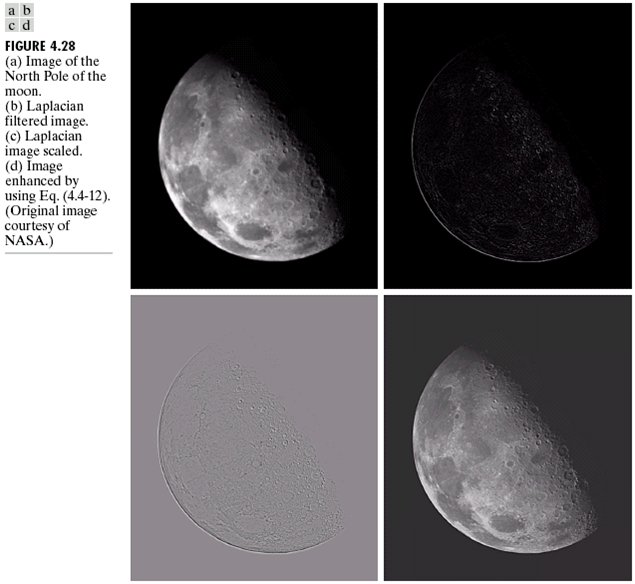
在频域上我们这样做,也可以实现锐化的效果:
在空间域上,我们做非锐化屏蔽(unsharp masking)是这样的:
$$
f_ {\mathrm{hp} }(x, y)=f(x, y)-f_ {\mathrm{lp} }(x, y)
$$
在频域上,需要下面这样做:
$$
F_ {\mathrm{hp} }(u, v)=F(u, v)-F_ {\mathrm{lp} }(u, v)
$$
因为$F_ {\mathrm{lp} }(u, v)=H_ {\mathrm{lp} }(u, v) F(u, v)$,所以我们得到:
$$
H_ {\mathrm{hp} }(u, v)=1-H_ {\mathrm{lp} }(u, v)
$$
一般来说,空间域易于计算,频域更容易理解和设计算法,但是相对复杂,计算量也较大,DFT是实现频域算法的关键步骤。
其他一些频域滤波
高通量滤波
上一篇文章介绍了,在空间域中,高通量滤波(High-boosting filtering)的做法,首先计算非锐化屏蔽(unsharp masking)的图:
$$
f_ {s}(x, y)=f(x, y)-\overline{f}(x, y)
$$
然后让原图加上计算的图(这里的A可能和之前的k相关):
$$
\begin{aligned} f_ {\mathrm{hb} }(x, y) &=A f(x, y)-\overline{f}(x, y) \ f_ {\mathrm{hb} }(x, y) &=(A-1) f(x, y)+f(x, y)-\overline{f}(x, y) \ f_ {\mathrm{hb} }(x, y) &=(A-1) f(x, y)+f_ {s}(x, y) \end{aligned}
$$
而在频域上的高通量滤波如下:
$$
H_ {\mathrm{hb} }(u, v)=(A-1)+H_ {\mathrm{hp} }(u, v)
$$
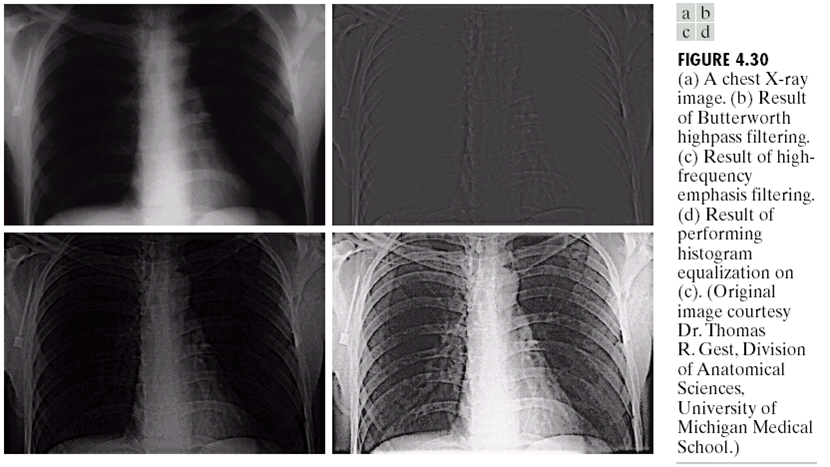
高频强调滤波
除了高通量滤波,这里再介绍一个类似于高通量滤波的滤波器:高频强调滤波(High-Frequency Emphasis Filtering)。它可以增强高频成分。数学形式如下:
$$
H_ {\mathrm{hfe} }(u, v)=a+b H_ {\mathrm{hp} }(u, v)
$$
可以看到的是,当上式中$a = (A-1),b=1$时,它与高通量滤波一致。一般来说这里的$b$会大于1,可以强调高频的成分。
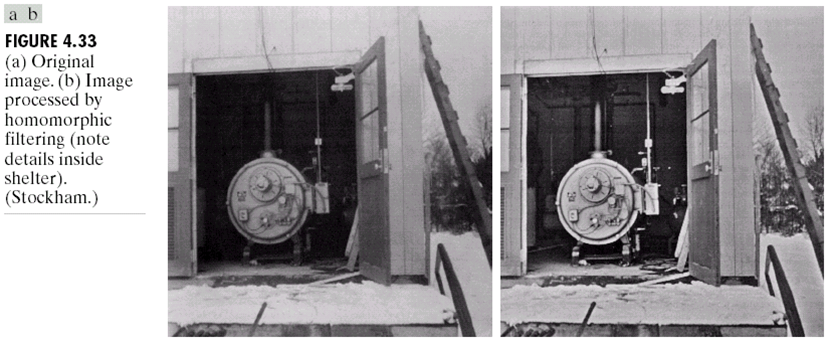
同态滤波
同态滤波(Homomorphic Filtering)想法来源于illumination-reflectance模型:
$$
f(x, y)=i(x, y) r(x, y)
$$
但是在频域上是很难实现的,因为空间域中的乘积意味着频域中的卷积。解决方法是,在转化到频域之前,先利用log函数,然后经过滤波之后回到空间域,再使用log的逆达到想要的效果。流程如下:

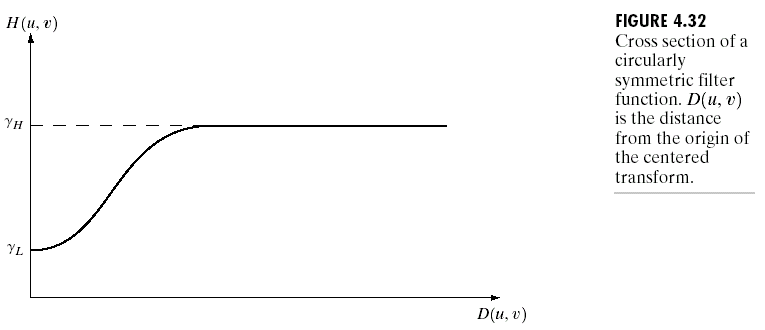
同态滤波应用在于减少光照变化并且锐化边缘,它可以减少低频增加高频。因为显示中光照变化缓慢,属于低频,而反射变化比较突然,属于高频信息。同态滤波的函数曲线应该如下图,低频的信息给较低的权重,而高频的信息给较高的权重。
下面是同态滤波效果图:
实现上图的效果的滤波器数学形式如下:
$$
\begin{array}{l}{H(u, v)=\left(\gamma_ {H}-\gamma_ {L}\right)\left[1-e^{-c\left(\frac{D^{2}(u, y)}{D_ {0}^{2} }\right)}\right]+\gamma_ {L} } \ {\text { where } \gamma_ {L}=0.5, \gamma_ {H}=2.0}\end{array}
$$
实现中一些值得注意的问题
FS,FT,DFT
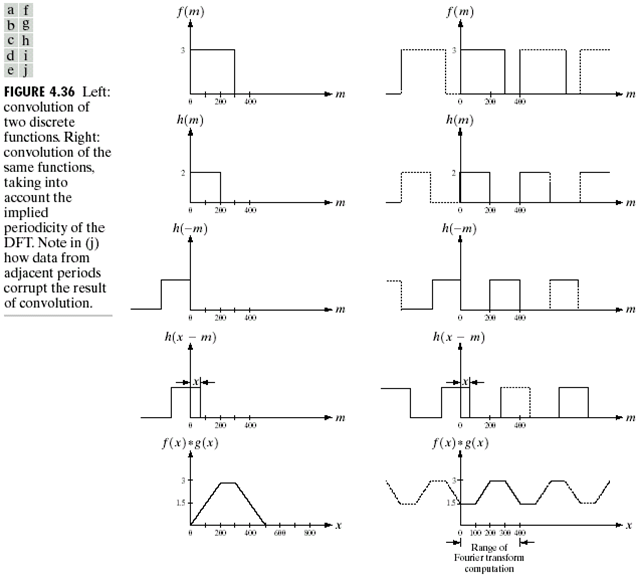
对于不同的信号,空间域中,非周期的连续信号,使用FT,周期连续信号,使用FT,FS(傅里叶级数),周期离散信号,使用DFT。而使用DFT时,我们暗示假设了周期性,因此总是会使用循环卷积。
Zero padding
补零操作细节如下:
$$
f_ {e}(x)=\left{\begin{array}{ll}{f(x)} & {0 \leq x \leq A-1} \ {0} & {A \leq x \leq P}\end{array}\right. g_ {e}(x)=\left{\begin{array}{ll}{g(x)} & {0 \leq x \leq B-1} \ {0} & {B \leq x \leq P}\end{array}\right.
$$
上式中,$P\ge A +B - 1$。

DC component
DFT中直流分量占据了大量的位置,一般来说,我们会把直流分量放在图的中间。如果实现这个?在matlab中使用fftshift,它利用了DFT的性质:
$$
f\left(x-x_ {0}, y-y_ {0}\right) \longleftrightarrow F(u, v) e^{-j 2 \pi\left(u \frac{x_ {0} }{M}+v \frac{y_ {0} }{N}\right)}
$$
当$x_0=\frac{M}{2},y_0=\frac{N}{2}$:
$$
f\left(x-\frac{M}{2}, y-\frac{N}{2}\right) \longleftrightarrow F(u, v)(-1)^{(u+v)}
$$
类似的:
$$
f(x, y) e^{j 2 \pi\left(u \frac{x_ {0} }{M}+v \frac{y_ {0} }{N}\right)} \longleftrightarrow F\left(u-u_ {0}, v-v_ {0}\right)
$$
当$u_0=\frac{M}{2},v_0 = \frac{N}{2}$,
$$
f(x, y)(-1)^{(x+y)} \longleftrightarrow F\left(u-\frac{M}{2}, v-\frac{N}{2}\right)
$$