图形学——B样条曲线和曲面
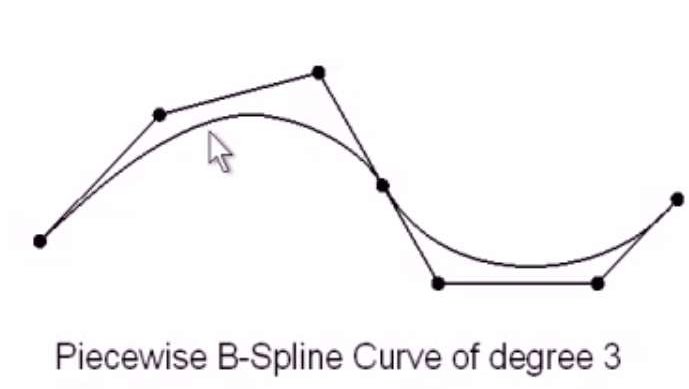
Bezier曲线虽然有很多优点,但是有一些明显的缺点。上次也提到了,在CAD中通常不鼓励使用高阶的Bezier基函数来画曲线,而使用低阶拼接。但是在低阶中拼接,要保证几何连续性又是非常困难的一件事情。对于Bezier曲线,如果控制点过多,无法进行局部调控。改变一个控制点,就会改变整个曲线,这里介绍B样条。
B样条的动机来源于插值中的Runge-Kutta现象,高阶多项式很容易产生不稳定的上下波动。而样条思想,就是用分段低阶多项式通过连续的连接来代替高阶的多项式。
引出B样条
在Schoenberg提出了一个基于样条的方法来近似曲线,在提出之后的很长一段时间里,人们都认为使用样条来进行形状设计太过于复杂,因此不能实现,直到Gordon和Riesenfeld基于前人的工作提出了B样条以及一系列对应的几何算法。B样条曲线和曲面保证了Bezier的优点,同时也克服了Bezier曲线的缺点。
样条函数的插值,可以通过求解一个三对角方程来进行,可能就是对几个点做一个空间曲线(比如二次三次)的假设,求解曲线的参数。而对于一个给定的区间划分,可以类似地计算样条曲线的插值。给定区间上的所有样条函数组成一个线性空间,这个线性空间的基函数就叫做B样条基函数。
B样条曲线及其性质
$$
P(t) = \sum_ {i=0}^nP_iN_ {i,k}(t).
$$
上式中,$P_ {i}(i=0,…,n)$是控制点,$N_ {i,k}(i=0,…,n)$是第$i$个$k$阶B样条基函数。B样条基函数是分段$k$次($k+1$阶)多项式,它们由节点向量唯一决定,节点向量则是一串非减的实数序列。要注意这里的阶比次多一,但是实际上是一样的,只是由于历史原因叫法不同。次是从0开始,而阶从1开始。
B样条基函数定义有多种解释,最简单的是由de Boor-Cox递推公式定义的:
$$
N_ {i,0}(t) = \left{\begin{matrix} 1 & t_i < t< t_ {i+1}\ 0 & otherwise \end{matrix}\right.\ N_ {i,k} = \frac{t - t_i}{t_ {i+k} - t_ {i} }N_ {i,k-1}(t) + \frac{t_ {i+k+1} - t}{t_ {i+k+1} - t_ {i+1} } N_ {i+1,k-1}(t)
$$
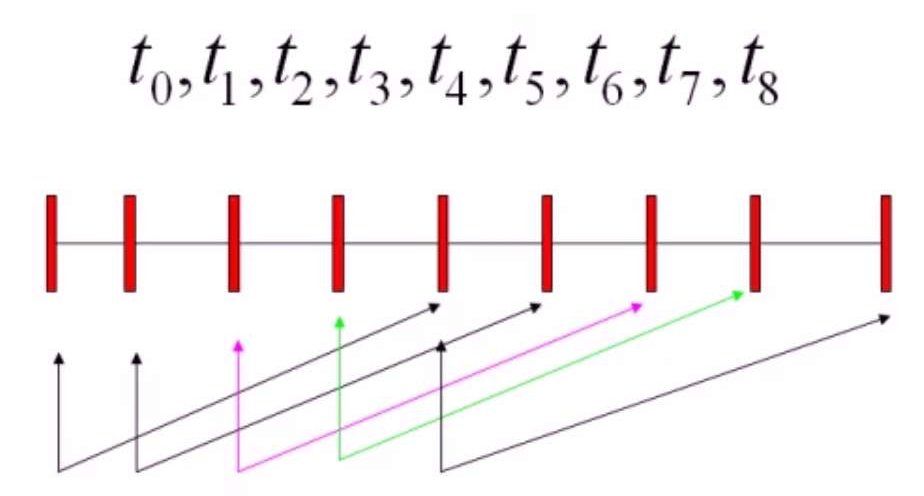
而$t$为节点向量,非减的实数序列:
$$
t_0,t_1,…,t_ {k-1},t_k,…,t_n,t_ {n+1},…,t_ {n+k-1},t_ {n+k+1}.
$$
现在考虑几个B样条基函数的问题:
- B样条基函数$N_ {i,k}(t)$的非零区间是什么?
从上述可以看到,当$k=0$时,$N_ {i,0}(t)$的非零区间为:$(t_i - t_ {i+1})$。根据递推公式,可以得到: $$N_ {i,1} = \frac{t-t_i}{t_ {i+1} - t_ {i} } N_ {i,0}(t) + \frac{t_ {i+2} - t}{t_ {i+2}-t_ {i+1} }N_ {i+1,0}(t)$$
这时候,只要$N_ {i,0},N_ {i+1,0}$有一个不为0,那么$N_ {i,1}$就不为0,因此它的非零区间为:$(t_i,t_ {i+1})\cup(t_ {i+1},t_ {i+2})$,也就是:$(t_ {i},t_ {i+2})$。
依次类推,我们得到$N_ {i,2}$的非零区间为:$(t_i,t_ {i+2})\cup(t_ {i+1},t_ {i+3})$,也就是$(t_ {i},t_ {i+3})$。
最终得到$N_ {i,k}$的非零区间为:$(t_ {i},t_ {i+k+1})$。
- 一共需要多少个节点?
$N_ {i,k}(t)$的非零区间是$(t_ {i},t_ {i+k+1})$,共有$n$个控制节点,因此所有的非零区间为:$(t_ {0},t_ {k+1})\cup (t_ {1},t_ {k+2})\cup…\cup (t_ {n},t_ {n+k+1})$。因此需要的节点个数为$n+k+2$。
- B样条插值得到的曲线定义区间是什么?
这个也很容易得到:$(0,t_ {n+k+1})$。
以$k=3,n=4$为例:$P_ {t} = \sum_ {i=0}^4P_iN_ {i,3}(t)$,则求解$N_ {i,3}$的过程如下图:
B样条基函数性质
B样条基函数有很多性质与Bezier曲线类似。
- 非负性和局部支撑性
$N_ {i,k}(t)$是非负的,$N_ {i,k}(t)$是$[t_i,t_ {i+k+1}]$上的分段非零多项式:$$ N_ {i,k}(t) = \left { \begin{matrix} \ge 0 & t\in [t_i,t_ {i+k+1}]\ =0& otherwise \end{matrix} \right.$$ - 归一性
区间$[t_i,t_ {i+1}]$上的所有$k$次非零基函数的和为1:
$$
\sum_ {i=0}^n N_ {i,k}(t) = 1,t \in [t_i,t_ {i+1}].$$ - 基函数所满足的微分方程:
$$
N’_ {i,k}(t) = \frac{k-1}{t_ {i+k-1} - t_i}N_ {i,k-1}(t)+\frac{k-1}{t_ {i+k}- t_ {i+1} }N_ {i+1,k-1}(t)
$$
B样条分类
一般的曲线可以根据其起始点和终止点是否重叠分为开曲线(不重叠)和闭曲线(重叠)。
根据节点向量中节点的分类,B样条可以分为:
- 均匀B样条。节点成等差数列均匀分布,这样的节点分布对应的是均匀B样条基函数。
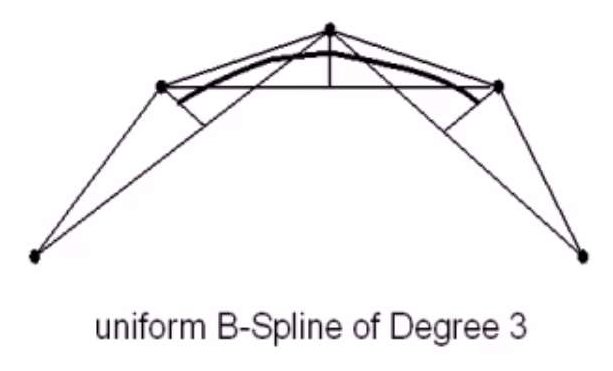
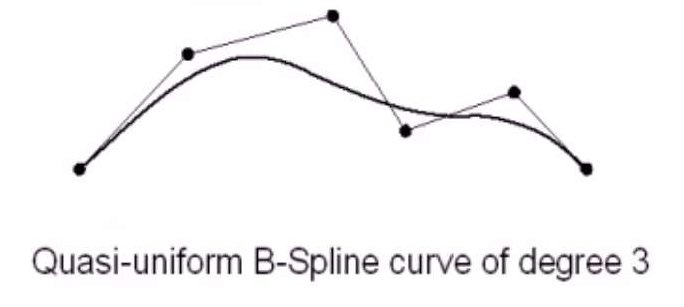
- 准均匀B样条。准均匀B样条的起始节点和终止节点都具有$k+1$的重复度,其他的节点和均匀B样条一致。均匀B样条不保持Bezier曲线的断电性质,起始点和终止点不在控制端点上。而准均匀B样条具有端点性质。
- 分段Bezier曲线。
除了终点和起始节点具有k+1个重复度,其他的节点具有$k$个重复度,这样得到的实际上是分段的Bezier曲线。此时需要节点个数满足:$(n+k+2-2)%k=0$。
对于分段的Bezier曲线,不同的曲线段相对独立。移动控制点只会影响其所在的Bezier曲线段,而其他的Bezier曲线段不会改变,但是分段Bezier曲线需要更多的参数和变量来进行控制,更多的控制点和更多的节点信息。
- 非均匀B样条。最一般的B样条,我们主要介绍这个。它的起始节点和终止节点的重复度小于等于$k+1$,而其他节点重复度小于$k$。
非均匀B样条
B样条曲线的性质:
- 局部支持性。区间$t \in [t_i,t_ {i+1}]$上的曲线仅由至多$k+1$个控制点决定。修改控制点$P_i$仅会影响到$(t_i,t_ {i+k+1})$上的曲线。
上述这个性质是可以根据定义推导出来的。
连续性:$P(t)$在每一个重复度为$r$的节点上具有$C^{k-r}$的连续性。不知道在说什么。
凸包性。B样条曲线被包围在其控制顶点的凸包内部。
分段多项式性质:任何一个由相邻节点确定的区间上,$P(t)$是一个关于t的次数不超过$k$的多项式。
导数公式:
$$\begin{aligned} P’(t) &= \left(\sum_ {i=0}^n P_i N_ {i,k}(t) \right)’ \ &= \sum_ {i = 0}^n P_i N_ {i,k}’(t)\ &= (k-1)\sum_ {i=0}^n \left(\frac{P_i - P_ {i-1} }{t_ {i+k} - t} \right)N_ {i,k-1}(t), t\in[t_k,t_ {n+1} ] \end{aligned}$$变差缩减性:任何一条直线与B样条曲线的交点个数不会超过该直线与B样条曲线的控制多边形的交点数目
几何不变性:曲线的形状和相对于控制点的位置不取决于坐标系的选择
仿射不变性:将仿射变换用于控制点,变换后的控制点得到的曲线就是仿射变换后的曲线。
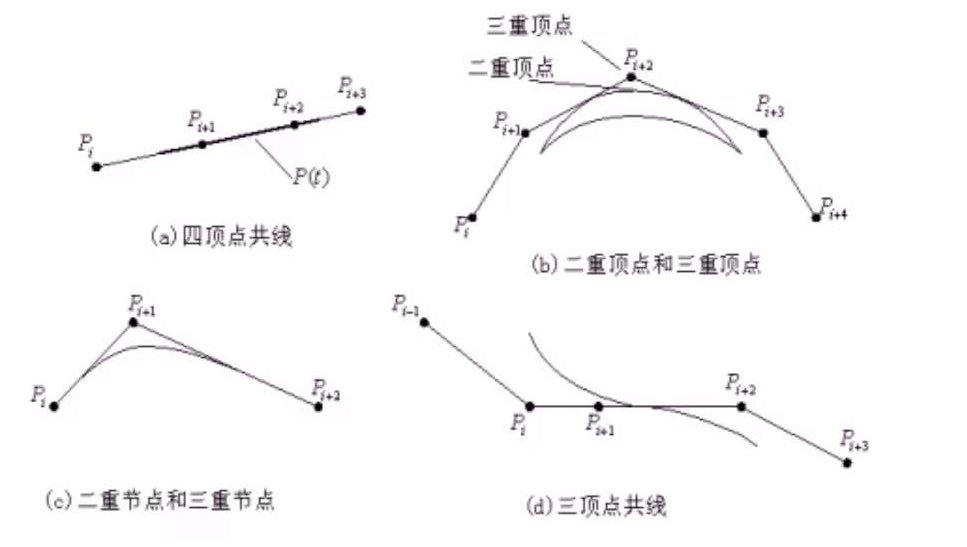
直线保持性:如果控制多边形退化成一条直线,那么B样条曲线在这条直线上
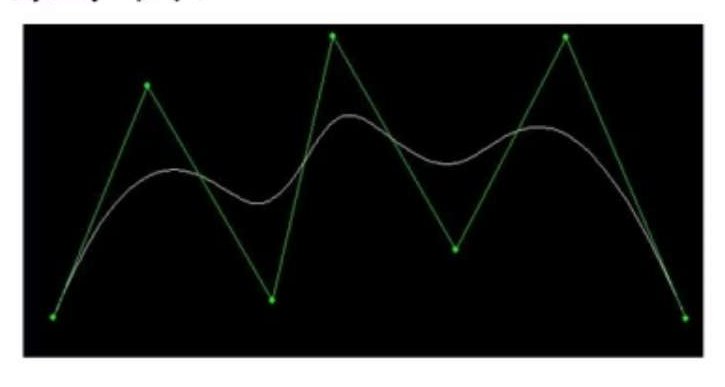
灵活性:使用B样条可以方便构成线段,尖点,切线等等特殊效果。对于灵活性有下面几个3次B样条基函数的例子:
de Boor算法
计算B样条曲线的一点可以直接使用B样条的公式,但是de Boor算法是一个更有效的算法。首先,我们知道:
$$
\begin{aligned} P(t) &= \sum_ {i=0}^nP_i N_ {i,k}(t) = \sum_ {i = j-k}^j P_iN_ {i,k}(t)\ &= \sum_ {i=j-k}^j P_i \left [\frac{t - t_i}{t_ {i + k} - t_i} N_ {i,k-1}(t) + \frac{t_ {i+k+1} - t}{t_ {i + k + 1} - t_ {i+1} }N_ {i+1,k-1}(t) \right]\ &= \sum_ {i= j-k}^j\left [ \frac{t - t_i}{t_ {i+k} - t_i}P_i + \frac{t_ {i+k} - t}{t_ {i+k} - t_i} P_ {i-1} \right] N_ {i,k-1}(t) \end{aligned}, t \in [t_j,t_ {j+1}]
$$
上面式子的由来也就是通过确定$t$的区间段$[t_j,t_ {j+1}]$,然后我们知道在这个区间内的曲线最多受到$k+1$个控制顶点的控制。
令:
$$
P_i^{[r]}(t) = \left{ \begin{matrix} P_i& r = 0, i = j-k,..,j;\ \frac{t - t_i}{t_ {i+k+1-r} - t_i}P_i^{[r-1]}(t) + \frac{t_ {i+k+1-r} - t}{t_ {i+k+1-r} - t_i} P_ {i-1}^{[r-1]}(t)& r = 1,2,…,k-1; i = j-k+r,…,j \end{matrix} \right.
$$
则:
$$
\begin{aligned} P(t) &= \sum_ {i=j-k}^jP_iN_ {i,k}(t)\ &= \sum_ {i= j -k+ 1}^j P_i^{[1]}(t)N_ {i,k}(t) \ &= \sum_ {i=j-k+2}^jP_i^{[2]}(t)N_ {i,k-2}(t)\ &= …\ &= P_i^{[k]}(t)N_ {i,0}(t) \end{aligned}
$$
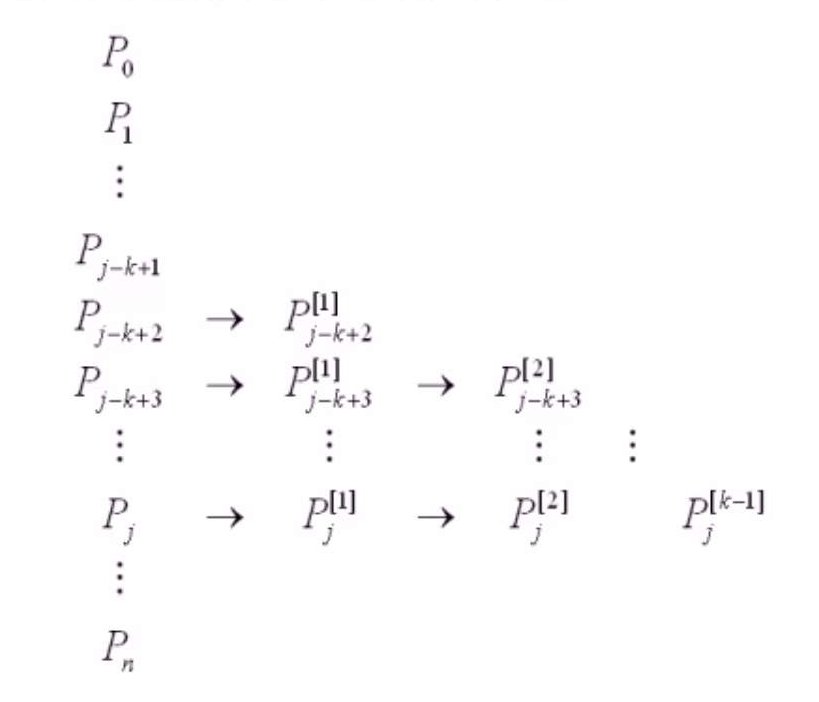
这就是de Boor算法。de Boor算法的递推也就是$P_i^{[k]}(t)$的过程。为了求这个,需要的递归方式如下图(下图的k表示的是阶数,因此是从$j-k+1$到$j$,需要的是$k$个控制点点,也就是次数里$k+1$个控制点):
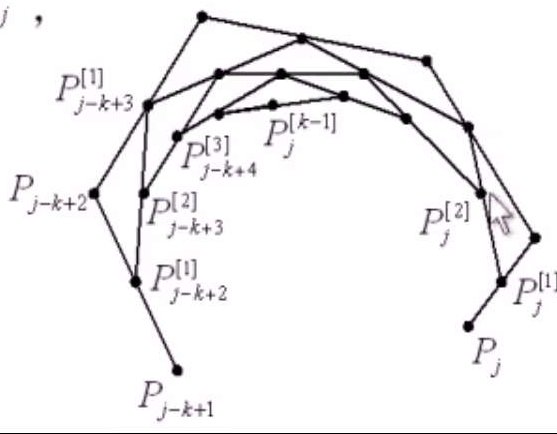
对于de Boor算法有比较直观的几何解释,也就是割角。因此它也被称为割角算法。下图的k依然是阶数。
节点插入
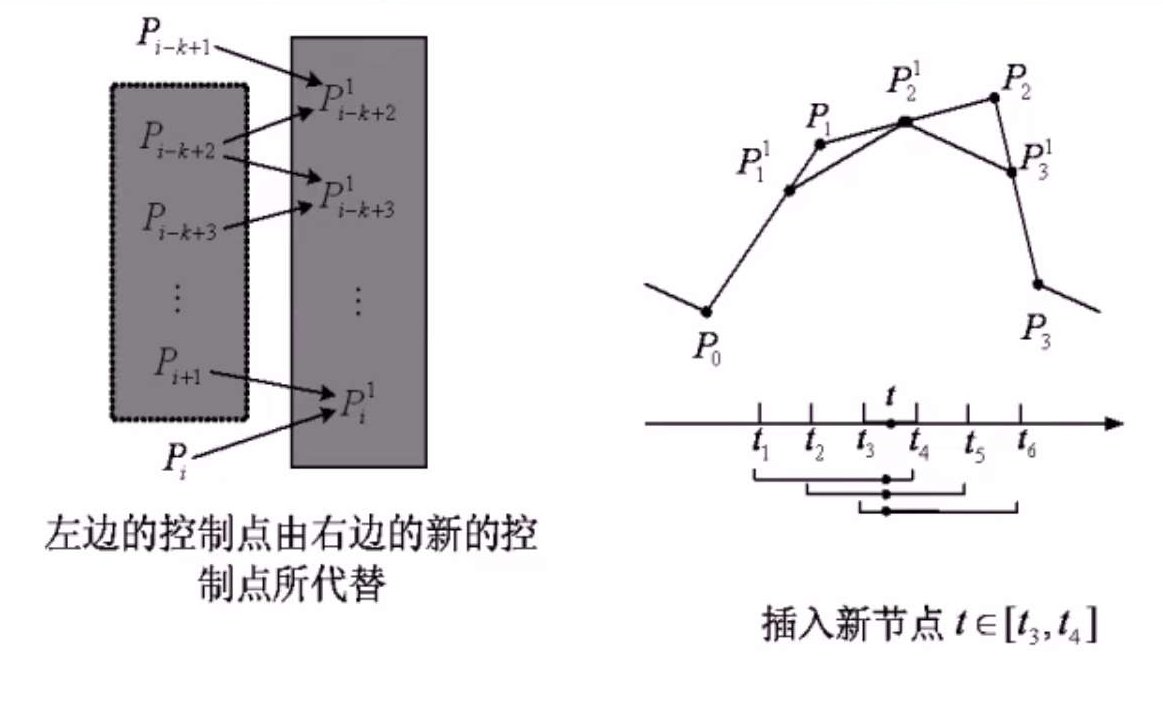
节点插入可以增加曲线的可控度。为了增加节点而且保持原有的曲线形状以及原来的次数,需要改变控制顶点的个数。节点插入可以被描述为下面的过程:
- 插入新的节点$t$到节点区间$[t_i,t_ {i+1}]$
- 节点向量变为:$T^1 = [t_0,t_1,…,t_i,t,t_ {i+1},…,t_ {n+k+1}]$
- 新的节点向量变为:$T^1 = [t^1_0,…,t^1_i,t^1_ {i+1},t^1_ {i+2},…,t_ {n+k+2}]$
新的节点向量对应了新的B样条计函数。假设原始曲线$P(t)$可以由这些新的基函数和新的控制定点$P_j^1$来表示,则:
$$
P(t) = \sum_ {j=0}^{n+1}P_j^1 N^1_ {j,k}(t)
$$
而Boehm给出了计算这些新的控制点的公式:
$$
\left{ \begin{matrix} P_j^1 = P_j & j=0,1,…,i-k\ P_j^1 = (1 - \beta_j)P_ {j-1}+\beta_jP_j& j = i-k+1,…,i-r\ P_j^1 = P_ {j-1} & j=i-r+1,…,n+1 \end{matrix} \right.
$$
上式中:
$$
\beta_j = \frac{t - t_j}{t_ {j+k} - t_j},
$$
$r$是新插入的节点$t$在节点序列中的重复度。如下图(图中k为阶数):
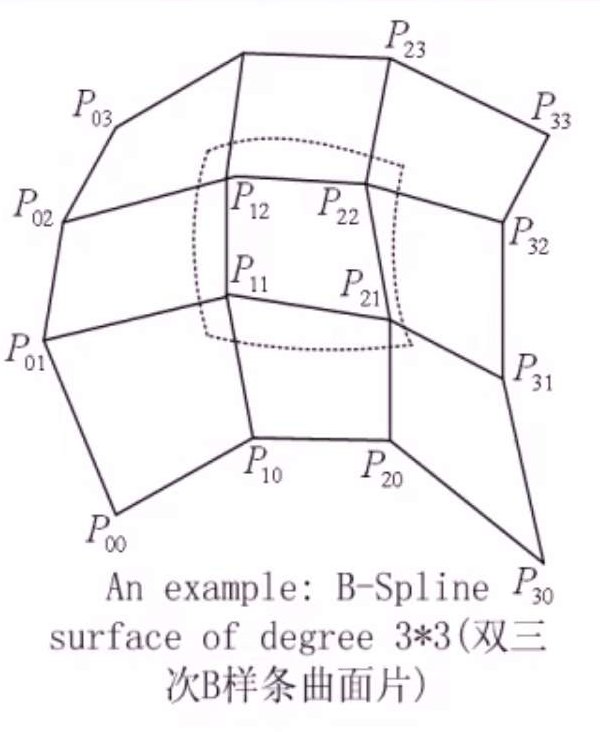
B样条曲面
给定$U,V$轴上的节点向量:
$$
U = [u_0,u_1,…,u_ {m+p}]\ V = [v_0,v_1,…,v_ {n+q}]
$$
阶为$p \times q$的B样条曲面可以定义为:
$$
P(u,v) = \sum_ {i=0}^m \sum_ {j=0}^n P_ {ij}N_ {i,p}(u)N_ {j,q}(v)
$$
NURBS曲线/曲面
B样条和Bezier都有缺点,不能精确表示圆锥曲线。而NURBS(非均匀有理B样条)目的在于找到能精确描述圆锥曲线以及二次曲面的方法。在这里简单介绍一下NURBS。
NURBS有下面几个优势:
- 它提供了一个更一般更精确的方法来表达并对自由曲线/曲面进行设计。
- 提供了一个通用的数学形式,可以同时表示标准的解析曲线/曲面(如圆锥曲线)以及自由曲线/曲面(如参数曲线)。
- 存在稳定快速的数值计算方法。
- 具有仿射变换不变性,也有投影变换不变性
- 对于NURBS的控制点和权重都能任意修改,用NURBS来做设计有更大的灵活性
- 非有理B样条,非有理和有理Bezier曲线/曲面都可以看作NURBS的特殊形式
它的缺点是比传统的表达需要更大的存储空间,而且如果权重设计不合理,NURBS曲线可能会产生畸变。在某些情况下如曲线重叠,使用NURBS非常难以处理。
NURBS曲线是由分段有理B样条多项式基函数定义的:
$$
P(t) = \frac{\sum_ {i=0}^n \omega_i P_i N_ {i,k}(t)}{\sum_ {i=0}^n \omega_iN_ {i,k}(t)} = \sum_ {i=0}^nP_iR_ {i,k}(t)
$$
其中:
$$
R_ {i,k}(t) = \frac{\omega_i N_ {i,k}(t)}{\sum_ {j=0}^n \omega_jN_ {j,k}(t)}
$$
因此,从定义可以看出来它是B样条加权重。它的基函数$R_ {i,k}(t)$包含了B样条基函数的所有性质:
局部支持性,归一性,可微,变差缩减,凸包,仿射不变。
如果一个控制点的权重为0,那么该控制点的位置不对曲线产生任何影响。
如果一个控制点权重为正无穷,而$\omega_i=+\infty,R_ {i,k}(t)=1$,当$t \in [t_i,t_ {i+k}$,$P(t) = P_i$。
如果用齐次坐标表示控制点,即:$P_i^{\omega} = (\omega_ix_i,\omega_iy_i,\omega_i)$,则:
P^{\omega} (t) = \sum_ {i=0}^n P_i^{\omega}N_ {i,k}(t).
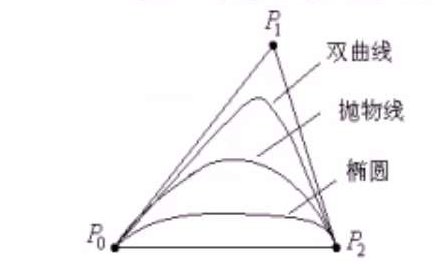
圆锥曲线的NURBS表示
对于3个控制定点,节点向量$T=[0,0,0,1,1,1]$,NURBS曲线退化成二阶Bezier曲线。很容易可以证明该曲线是二次曲线:
$$
P(t) = \frac{(1-t^2)\omega_0P_0 + 2t(1-t)\omega_1P_1 + t^2 \omega_2P_2}{(1-t^2)\omega_0+2t(1-t)\omega_1+ t^2 \omega_2}
$$
其中:
- $C_ {sf} = \frac{\omega_1^2}{\omega_0\omega_2} $是形状因子,决定了圆锥曲线的类型。当$C_ {sf}=1$时,曲线为抛物线。而对于$C_ {sf}<1$,曲线为椭圆,当$c_ {sf}=0$,曲线退化为一条直线,当$c_ {sf}>1$,曲线为双曲线,当$C_ {sf} \rightarrow \infty$,曲线退化为两条直线。
NURBS的修改
我们可以通过修改权重,控制点以及节点来修改NURBS曲线。对于权重,如果增加或者减少一个控制点的权重,曲线会向控制点靠近或远离。如果希望一个点$S$朝着控制点$P_i$靠近或原理距离$d$,可以修改权重:
$$
\omega^* = \omega_i\left[ 1 + \frac{d}{R_ {i,k}(t)(P_iS - d)}\right].
$$
对于控制点的修改,也会改变NURBS曲线的形状。我们还可以通过带约束的优化方法,来求解对于每个控制点的修改量,以得到最佳的修改量(比如需要经过空间中的某个点)。
NURBS曲面的定义也就是曲线简单的拓展:
$$
P(u,v) = \frac{\sum_ {i=0}^m\sum_ {j=0}^n \omega_ {ij} P_ {ij} N_ {i,p}(u)N_ {j,q}(v)}{\sum_ {i=0}^m\sum_ {j=0}^n \omega_ {ij} N_ {i,p}(u)N_ {j,q}(v)} = \sum_ {i=0}^m\sum_ {j=0}^n P_ {ij}R_ {i,p;j,q}(u,v) , u,v\in[0,1]
$$
上式中:
$$
R_ {i,p;j,q}(u,v) = \frac{ \omega_ {ij} N_ {i,p}(u)N_ {j,q}(v)}{\sum_ {r=0}^m\sum_ {s=0}^n \omega_ {rs} N_ {r,p}(u)N_ {s,q}(v)}
$$
NURBS曲面也具有可微性,同时存在局部极值点,也具有和B样条曲面类似的多种性质。这里就不过多介绍了。