SLAM——后端(二)Bundle Adjustment
Bundle Adjustment近些年在SLAM的研究中起到了非常重要的作用。Bundle Adjustment是将特征点与相机位姿一起作为优化变量,使得整体误差尽量变小。因为是非线性优化,不一定能找到全局最小值,因此对初始值的依赖比较大。另外,可以想象的到,BA需要计算的矩阵维度非常大,但是因为它特殊的结构,使得BA的计算简化了不少。
投影模型与BA代价函数
之前我们曾经介绍过投影模型以及畸变,现在我们重新复习下一个世界坐标系下的点$p$投影到照片上的过程。
- 将世界坐标系转换到相机坐标:
$$
P’ = Rp+t = [X’,Y’,Z’]^T$$ - 将$P’$投影到归一化平面,得到归一化坐标:
$$
P_c = [u_c,v_c,1]^T = [\frac{X’}{Z’},\frac{Y’}{Z’},1]$$ - 考虑径向畸变:
$$
\left{ \begin{matrix} u’_c = u_c(1+k_1r_c^2 + k_2r_c^4)\ v’_c = v_c(1+k_1r_c^2 + k_2r_c^4) \end{matrix} \right.$$ - 根据相机内参,得到像素坐标:
$$
\left{ \begin{matrix} u_s = f_xu’_c + c_x\ v_s = f_yv’_c+c_y \end{matrix} \right.$$
实际上,上面的一系列过程就是观测方程$z = h(x,y)$。具体地说,$x$指代的是此时相机的位姿,也就是$R,t$,对应的李代数为$\xi$。而$y$指的是路标,也就是三维点$p$,观测的数据是像素坐标$z = \triangleq [u_s,v_s]^T$。以最小二乘的角度考虑可以得到误差项:
$$
e = z - h(\xi,p).
$$
把其他时刻的观测量也考虑进来,设$z_ {ij}$为位姿$\xi_i$下对$p_j$的观测数据,则整体代价函数为:
$$
\frac{1}{2} \sum_ {i=1}^m \sum_ {j=1}^n \Vert e_ {ij}\Vert^2 = \frac{1}{2} \sum_ {i=1}^m \sum_ {j=1}^n \Vert z_ {ij} - h(\xi_i,p_j) \Vert^2.
$$
求解上述问题,就相当于对位姿和路标同时做了调整,也就是所谓的Bundle Adjustment。
BA求解
很明显,BA问题不是一个简单的线性问题。我们把自变量定义为所有代优化的变量:
$$
x = [\xi_1,\xi_2,…,\xi_m,p_1,…,p_n]^T
$$
假如$\Delta x$是整体自变量的增量,则:
$$
\frac{1}{2} \Vert f(x + \Delta x)\Vert^2 \approx \frac{1}{2} \sum_ {i=1}^m\sum_ {j=1}^n \Vert e_ {ij}+F_ {ij}\Delta \xi_ {i}+E_ {ij}\Delta p_j \Vert^2.
$$
上式中$F_ {ij},E_ {ij}$分别为误差项对相机位姿与路标的偏导数。我们在之前的内容(PnP)中也推导过它们的形式。现在,我们把相机位姿变量放在一起:
$$
x_c = [\xi_1,…,\xi_m]^T \in \mathbb{R}^{6m},
$$
同理,把空间点变量也放在一起:
$$
x_p = [p_1,…,p_n]^T \in \mathbb{R}^{3n}
$$
则增量误差可以写为:
$$
\frac{1}{2} \Vert f(x + \Delta x)\Vert^2 \approx \frac 1 2 \Vert e+F\Delta x_c E \Delta x_p \Vert^2
$$
上式由很多小型二次项和变成了一个整体的二范数,因此这里的雅科比矩阵$E,F$也是对整体变量的导数,它将是一个很大的矩阵,是由不同的$F_ {ij},E_ {ij}$拼接起来的。当然,由之前的非线性优化,我们可以使用高斯牛顿或者列文伯格——马夸尔特法来进行找到极小值,但是无论使用哪个都会面对增量线性方程:
$$
H \Delta x = g
$$
只不过在高斯牛顿中:
$$
H = J^TJ
$$
列文伯格中:
$$
H = J^TJ+\lambda I
$$
由于我们把变量归类成为了位姿和空间点两种,所以雅科比矩阵可以分块为:
$$
J = [F,E]
$$
如果使用高斯牛顿法,则:
$$
H = J^TJ = \begin{bmatrix} F^TF & F^TE\ E^TF & E^TE \end{bmatrix}.
$$
由于考虑了所有的优化变量,这个矩阵维度是非常大的。不过这里的$H$矩阵是有一定的特殊结构的,我们可以用它来加速求解过程。
稀疏性和边缘化
实际上,BA这个概念很早就提出了,不过当时研究者认为上述$H$矩阵太大,计算量是不可能完成的任务,直到近十年发现$H$矩阵的稀疏性可以加速求解。
首先,我们来考虑这个问题,就是cost function对变量$\xi_i,p_j$的雅科比矩阵,实际上只有$e_ {ij}$与它有关,也就是:
$$
J_ {ij}(x) = \left(0_ {2\times 6},…,0_ {2\times 6},\frac{\partial e_ {ij} }{\partial \xi_i},…,0_ {2\times 3},…,0_ {2\times 3},…,\frac{\partial e_ {ij} }{\partial p_j},0_ {2\times 3},…,0_ {2 \times 3}\right).
$$
上式中$0_ {2 \times 6}$表示$2\times 6$的零矩阵。该误差项对于相机姿态的偏导为$2\times 6$,对于路标点的偏导为$2 \times 3$(详情见PnP)。实际上这个很符合直觉,因为别的地方的误差项与当前的位姿和路标是无关的。
假如$J_ {ij}$只在$i,j$处有非零块,它对于$H$的贡献为$J_ {ij}^TJ_ {ij}$。不难理解这个$J_ {ij}^TJ_ {ij}$也只有4个非0块,分别位于$(i,i),(i,j),(j,i),(j,j)$。而对于$H$:
$$
H = \sum_ {i,j}J_ {ij}^TJ_ {ij},
$$
我们将$H$分块:
$$
H = \begin{bmatrix} H_ {11}&H_ {12}\ H_ {21}&H_ {22} \end{bmatrix}.
$$
分块的依据是,$H_ {11}$只和相机位姿有关,而$H_ {22}$只和路标点有关。同时还有下面的事实成立:
- $H_ {11}$是对角阵,只在$H_ {ii}$处有非零块
- $H_ {22}$也是对角阵,只在$H_ {jj}$处有非零块
- 对于$H_ {12}$或者$H_ {21}$,它们是稠密还是稀疏是不确定的。
注意,上述对角阵针对的是分块矩阵,并不意味着是只有对角线元素非0。
这就显示了$H$矩阵的稀疏结构。一般情况下的$H$矩阵如图: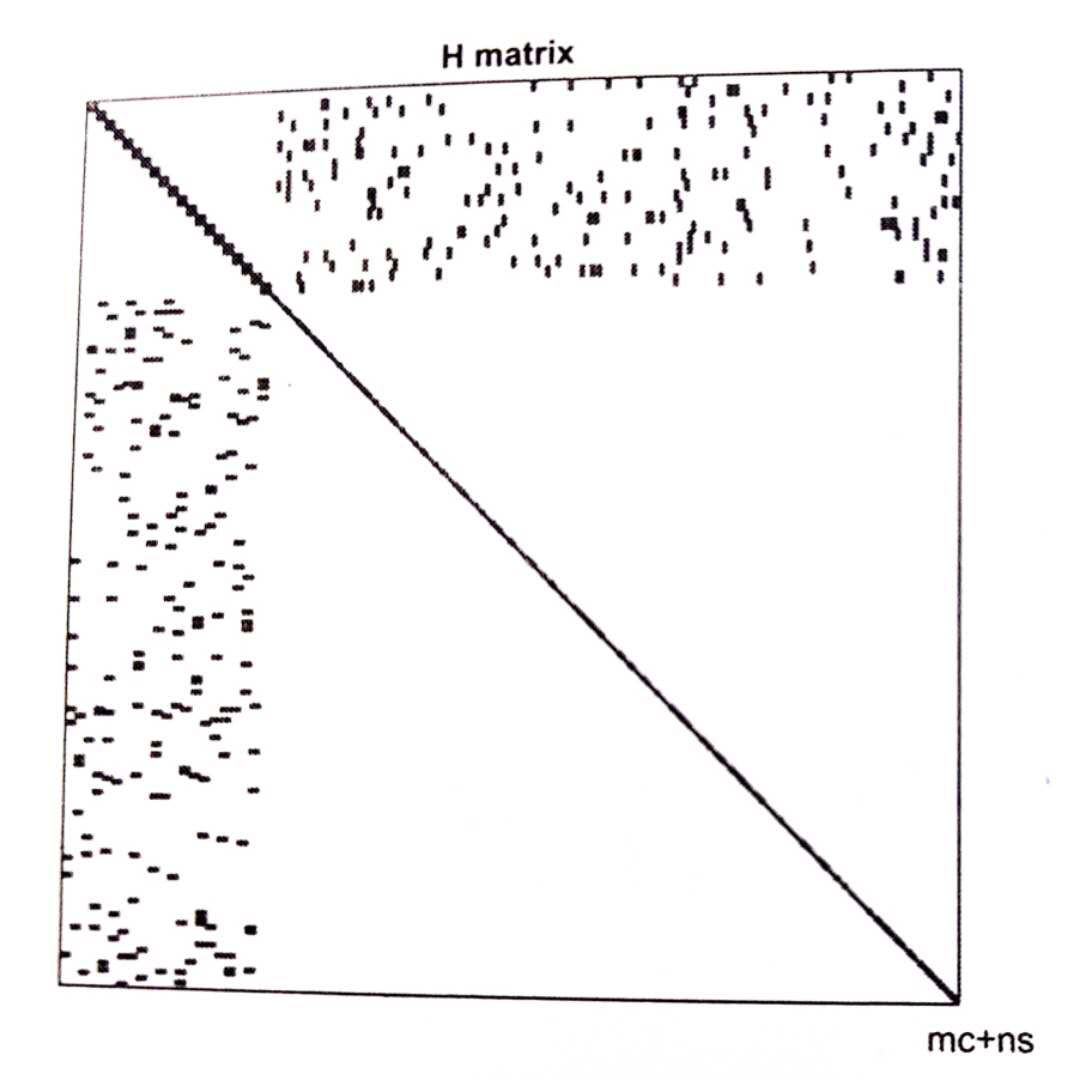
对于这种稀疏矩阵的求解,存在许多可以加速计算的方法,在这篇文章中会介绍一种叫做边缘化(marginalization)的方法。为了方便后面的说明,我们将矩阵分块为$B,E,E^T,C$四个块。如图:
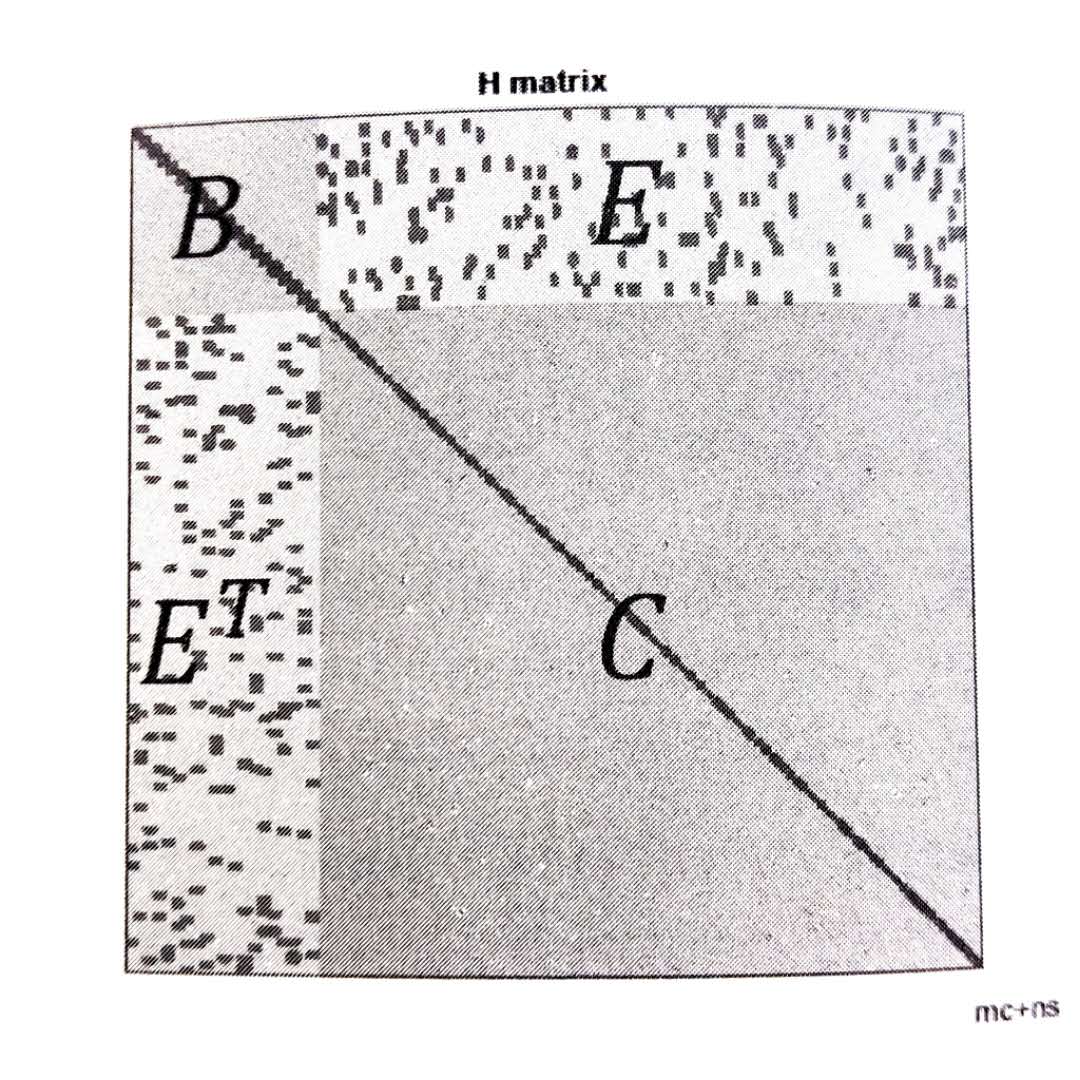
因此,对应的线性方程组$H\Delta x = g$可以写成下面的形式:
$$
\begin{bmatrix} B&E\ E^T&C \end{bmatrix} \begin{bmatrix} \Delta x_c\ \Delta x_p \end{bmatrix} = \begin{bmatrix} v\ w \end{bmatrix}.
$$
由于在实际中,往往路标的个数远远大于相机位姿的个数,因此实际中$C$的维度也比$B$要大很多。$B,C$都是对角矩阵,而$C$每个非零块维度为$3\times 3$。对角矩阵求逆难度远小于一般矩阵的难度,因此我们只需要对对角线矩阵块分别求逆即可。考虑到这个,我们对线性方程组进行高斯消元,目的是消去$E$:
$$
\begin{bmatrix} I&-EC^{-1}\ 0&I \end{bmatrix}\begin{bmatrix} B&E\ E^T&C \end{bmatrix}\begin{bmatrix} \Delta x_c\ \Delta x_p \end{bmatrix} = \begin{bmatrix} I&-EC^{-1}\ 0&I \end{bmatrix}\begin{bmatrix} v\ w \end{bmatrix}.
$$
整理可得:
$$
\begin{bmatrix} B - EC^{-1}E^T & 0\ E^T & C \end{bmatrix}\begin{bmatrix} \Delta x_c\ \Delta x_p \end{bmatrix} = \begin{bmatrix} v - EC^{-1}W\ w \end{bmatrix}.$$
经过消元以后,方程第一行变成和$\Delta x_p$无关的项,拿出来可以得到:
$$
\begin{equation} [B-EC^{-1}E^T]\Delta x_c = v - EC^{-1}w. \end{equation}
$$
通过上述方程求解得到$\Delta x_c$,代入原方程求解得到$\Delta x_p$。这个过程被称为Marginalization,或者Schur消元。它的优势在于利用了对角块矩阵的逆更好求,加速了求解过程。
至于方程$(1)$,它的求解没有什么特殊的办法。我们记此方程稀疏为$S$矩阵,它的维度和$B$一致。$S$矩阵的稀疏性是不规则的,它的物理意义为,如果在S矩阵非对角线上存在非零矩阵块,那么意味着该处对应的两个相机位姿有共同观测的路标。因此$S$矩阵的稀疏性主要与实际场景相关。以上就是对于$H$矩阵稀疏结构的应用。
从概率的角度来说,我们将对于$(\Delta x_c,\Delta x_p)$的求解转化成了先求$\Delta x_c$再求$\Delta x_p$,相当于做了条件概率的展开:
$$
P(x_c,x_p) = P(x_c)\cdot P(x_p\vert x_c).
$$
因此相当于求了边缘分布,所以被称为边缘化。
Robust Kernel function
此外,我们在介绍一个鲁棒的核函数。因为我们在用二范数误差时候,假设的是特征点匹配都是正确的。而实际中,经常出现误匹配的现象。在优化时候,我们依然当成了正确的匹配,这时候为了满足这个错误项,就会朝着错误的方向去走了。其中一个原因是二范数的增长太快。因此研究者提出了一些比二范数增长更慢的核函数,用的最多的是Huber norm:
$$
H(e) = \left {\begin{matrix} \frac 1 2 e^2 & \vert e\vert \leq \sigma\ \sigma(\vert e\vert - \frac{1}{2}\sigma) & \text{otherwise} \end{matrix} \right.
$$
可以看到的是当误差大于某个阈值之后,函数增长变成了一次形式,同时还方便求导。相对于二范数度量,它有更好的鲁棒性。它的图像如下: