机器学习——Kernel Support Vector Macine
上次遇到的问题是,Q矩阵的计算,仍然可能需要耗费很大计算量,也就是对于很高维度的特征转换,我们不一定能高效解决,更不用说无限维度。
因此这次引入了核函数,告诉我们如何高效地对待特征转换地问题。
Polynomial Kernel
为了方便起见,我们希望可以把原来问题描述中的$X$换为$Z$,表示$Z$是$X$经过特征转换之后得到的高维度空间,而假设$X$维度是较低的。因此,现在的问题描述如下:
$min_ {\alpha} \frac 1 2 \sum_ {n=1}^N \sum_ {m=1}^N a_na_my_ny_mZ_n^TZ_m - \sum_ {n=1}^N \alpha_n$
subject to $\sum_ {n=1}^N y_n\alpha_n = 0;a_n \ge 0,n=1,…,N$
上次我们也介绍了Q矩阵的计算,其中$q_ {n,m} = y_ny_mZ_n^TZ_m$.这其中包含了对$Z$向量的乘积,因此隐含了很大的计算量。
假设,我们对$X$到$Z$向量的转换表示如下:$Z = \phi(X)$,那么上式中$Z_n^TZ_m = \phi(X_n)^T\phi(X_m)$.
我们知道,对于单单$X_n^TX_m$的计算是容易完成的,那么能不能通过什么办法用上面的计算来代替原来的硬算?
假设如下:$\phi(X) = {1,x_1,x_2,x_3…x_d,x_1^2,x_1x_2,…x_2x_1,x_2^2,…,x_dx_1,…x_d^2}$.
那么$\phi(X_n)^T\phi(X_m) = 1 + \sum_ {i=1}^{d}x_i^nx_i^m + \sum_ {i=1}^d\sum_ {j=1}^d x_i^nx_j^nx_i^mx_j^m $
$\phi(X_n)^T \phi(X_m) = 1+X_n^TX_m + \sum_ {i=1}^{d}x_i^nx_i^m \sum_ {j=1}^{d} x_j^n x_j^m = 1+X_n^TX_m + (X_n^TX_m)^2 $.
可以发现,通过这样的变换,我们很轻易地计算出$Z_n^TZ_m$.
在这里,我们称$k(X,X’) = 1+X^TX’ + (X^TX’)^2 $为一种核函数。如果我们对特征转换再进行一些处理,比如:$\phi(X) = {1,\sqrt 2 x_1,\sqrt 2 x_2,\sqrt 2 x_3…\sqrt 2 x_d,x_1^2,x_1x_2,…x_2x_1,x_2^2,…,x_dx_1,…x_d^2}$,
那么最后得到的是$k(x,x’) = (1+X^TX’)^2$。实际上,我们也可以转换到更高维的空间,继续推广到更一般的:$K(x,x’) = (\zeta + \xi x^Tx’)^d$. 这就是很有名的Polynomial Kernel。
当然,通过多项式核函数,我们无法实现无限维度的转换。
Gaussian Kernel(RBF Kernel)
对于高斯Kernel的介绍,我们尝试用另一种办法来推导。为了方便起见,我们假设维度只有一维,即$X = {x}$.
在这里直接给出$K(X,X’)$的定义如下:$K(X,X’) = e^{-(x -x’)^2}$.
然后我们一步步推向前推导,说明它其实是无限维度转换后的$X^TX$.
$$
\begin{align}
K(X,X’) &= e^{-(x - x’)^2}\
&= e^{-x^2} e^{-(x’)^2}e^{2xx’} \
&=Taylor=>e^{-x^2}e^{-(x’)^2}(\sum _ {i=0} ^ {\infty} \frac {(2xx’)^2}{i!})\
&= \sum_ {i=0}^{\infty} \frac {(\sqrt 2 x)^i}{\sqrt{i!} }e^{-x^2} \frac {(\sqrt 2 x’)^i}{\sqrt{i!} } e^{-(x’)^2}
\end{align}
$$
因此,这个转换就是 $\phi(x) = exp(-x^2)(1,\sqrt{\frac 2 {1!} }X,\sqrt{\frac {2^2}{2!} }X^2,…)$
可以证明的是,上升到多维度,Gaussian Kernel:
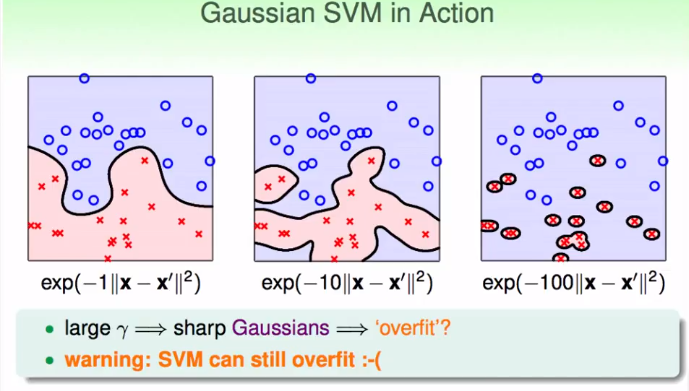
$K(X,X’)$ = $e^{-\gamma ||X - X’||^2}$ with $\gamma > 0$.
这就是高斯核函数。但是需要注意的一点,高斯核函数放大无限维度空间,所以如果参数$\gamma$不当,仍然有可能overfitting.如下图:
Comparison
还有一个核函数,叫线性核函数:$K(x,x’) = x^Tx’$.
这个核函数,简单,也迅速,但是能力有限。
多项式核函数:$K(x,x’) = (\zeta + \xi x^tx’)^d$.
相对于线性核函数,它的能力强了很多,但是调参很难,因为有3个参数。相应的它的速度没有线性那么快。而且如果d很大,要么结果很接近0,要么很大,不会取得很好的结果。因此,它一般来说,只在d比较小的时候适用。
高斯核函数:$K(X,X’)$ = $e^{-\gamma ||X - X’||^2}$
高斯核函数很强大,计算速度比线性的略慢,但是也不差。但是它可能太过强大了,需要慎重适用,因为可能出现过拟合的情况。但是总体来说,一般来说高斯核函数是最常用的。
当然,还有很多别的核函数,只需要满足Mercer定理即可。
Mercer定理:
如果函数K是$\mathcal{R}^n \times \mathcal{R}^n->\mathcal{R}$上的映射(也就是从两个n维向量映射到实数域)。那么如果K是一个有效核函数(也称为Mercer核函数),那么当且仅当对于训练样例${x_1,x_2,…x_n}$,其相应的核函数矩阵是对称半正定的。
我们可以发现,kernel的区别实际上是特征转换的区别,只不过某些特征转换可以更容易地计算Q矩阵。